AOS(自律運用OS) ROBO-HI OS
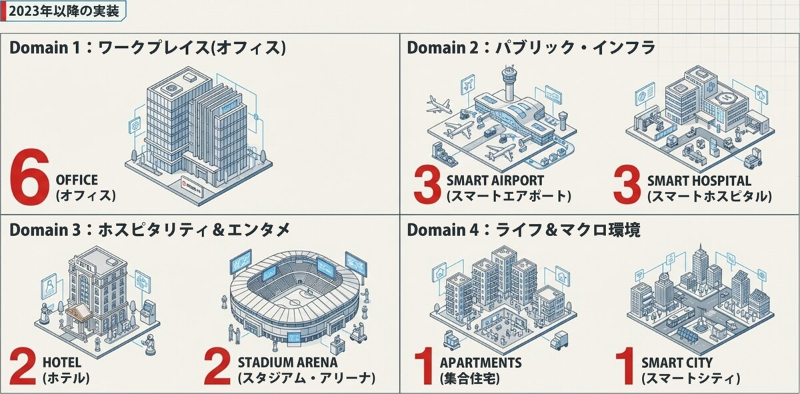
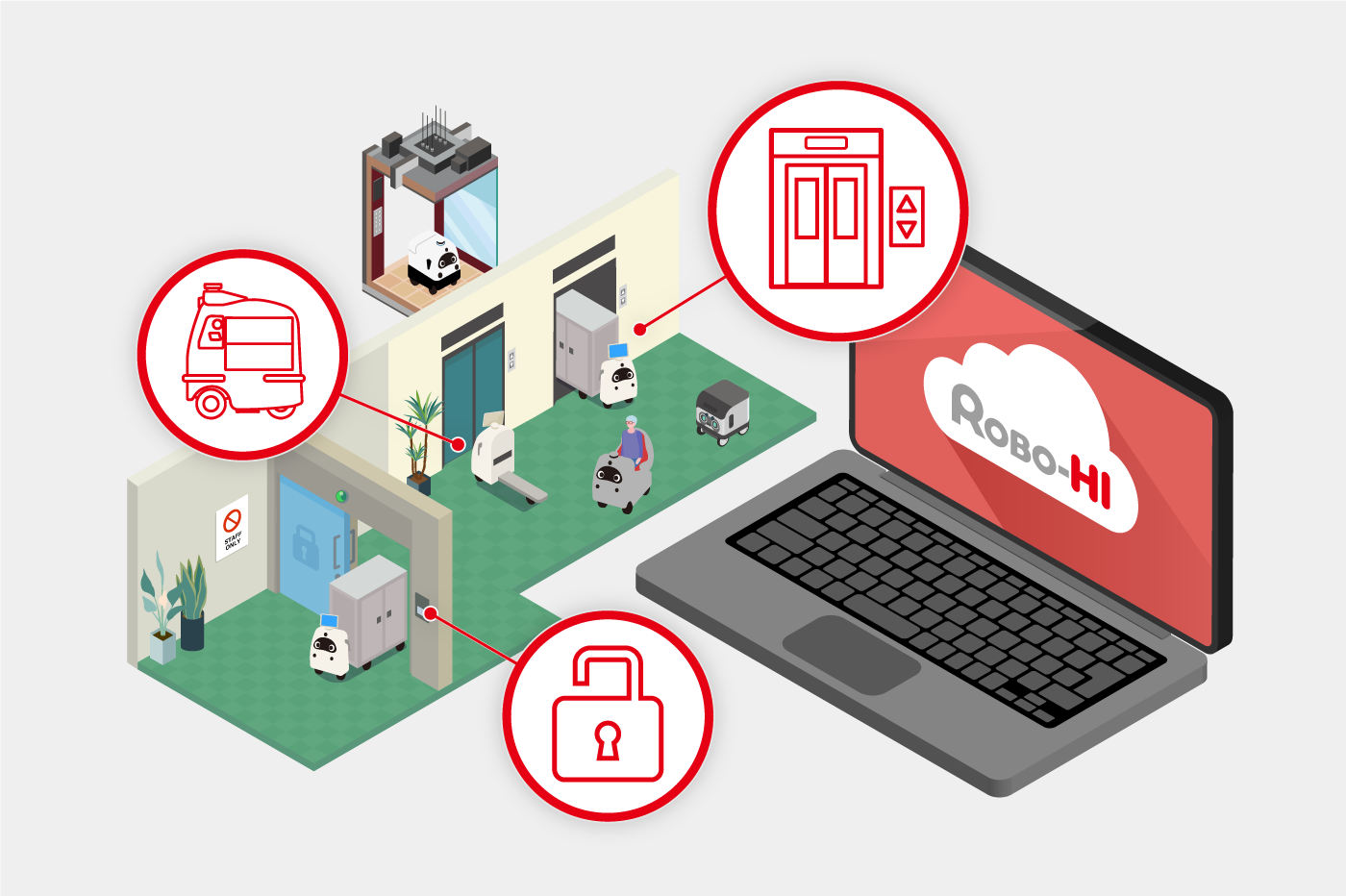
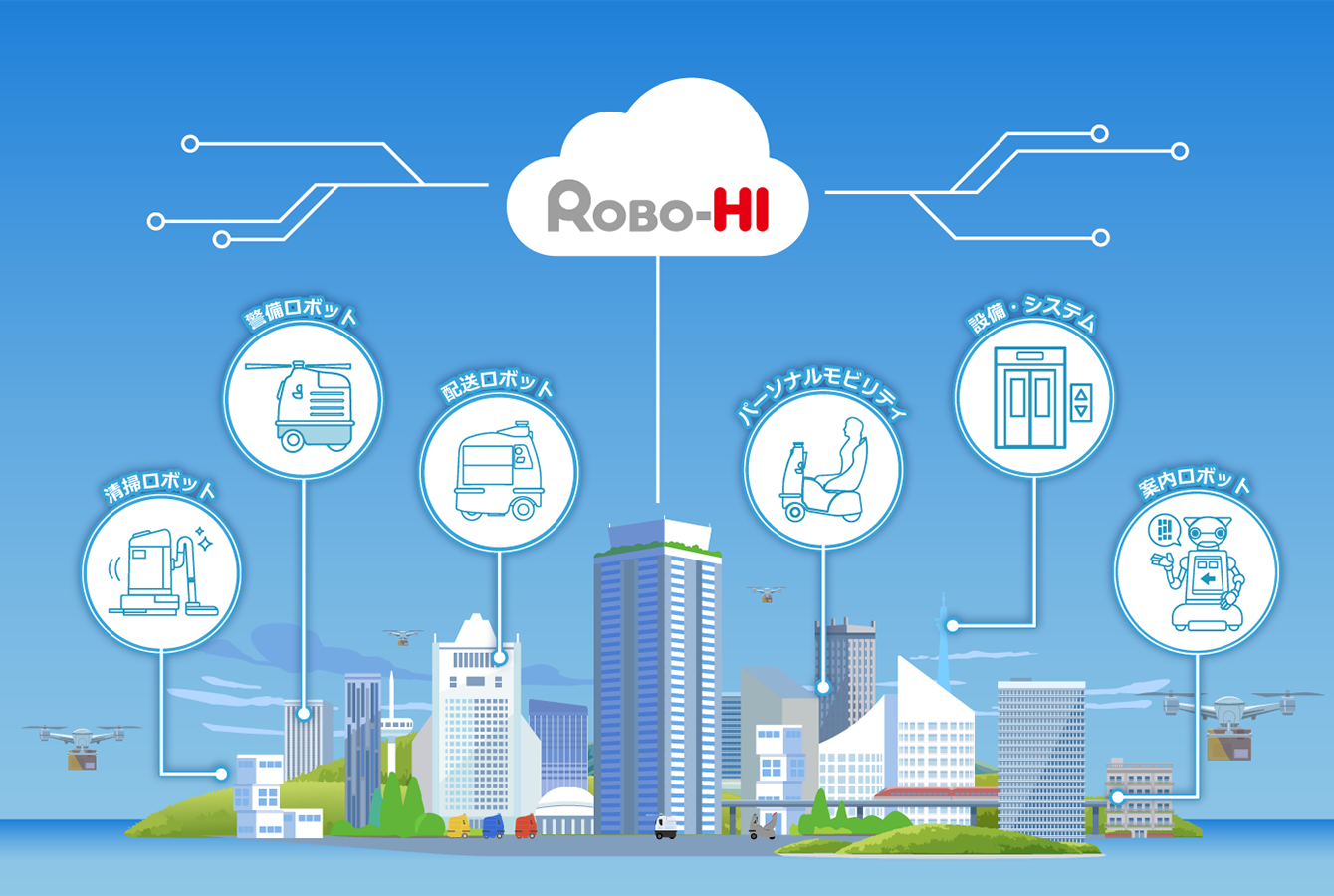
オフィスビルや病院、商業施設などで稼働する複数メーカーのロボを統合管理するマルチベンダー・ロボプラットフォーム

オフィスビルや病院、商業施設などで稼働する複数メーカーのロボを統合管理するマルチベンダー・ロボプラットフォーム
メガメニューを一時的に格納するセクション(消さないでください)
About

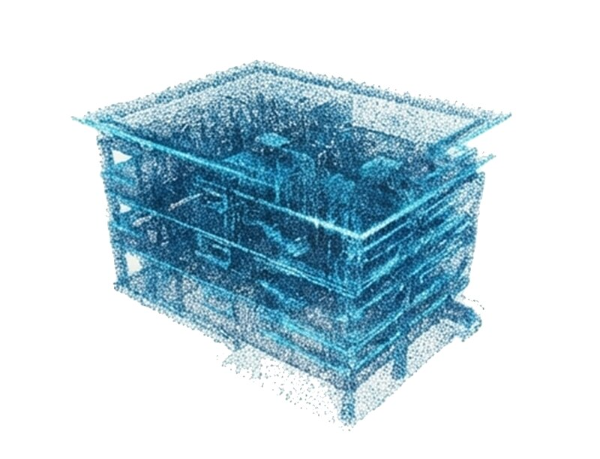
ステップ1:
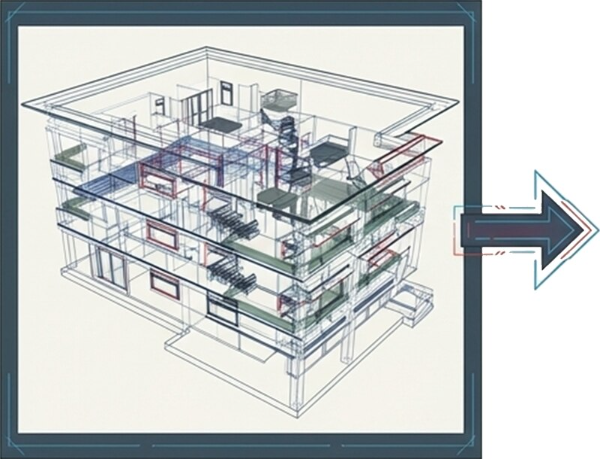
BIMから点群データ、絶対座標への変換(特許技術)。バラバラなロボットの座標系をROBO-HIが一つに統合。
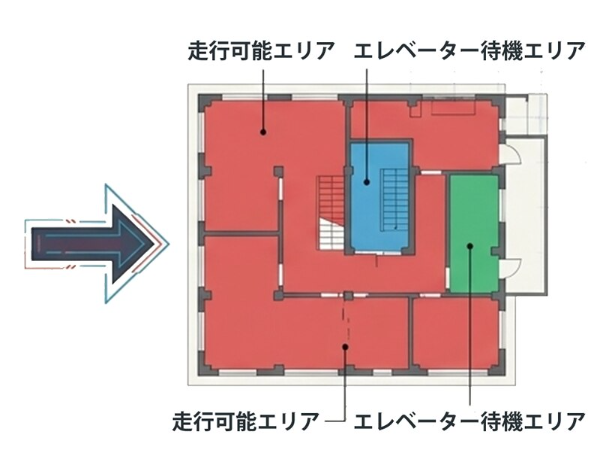
ステップ2:
空間への意味付け。走行可能エリア、エレベーター待機エリア、優先エリアを定義し、ロボットの行動シナリオを生成。

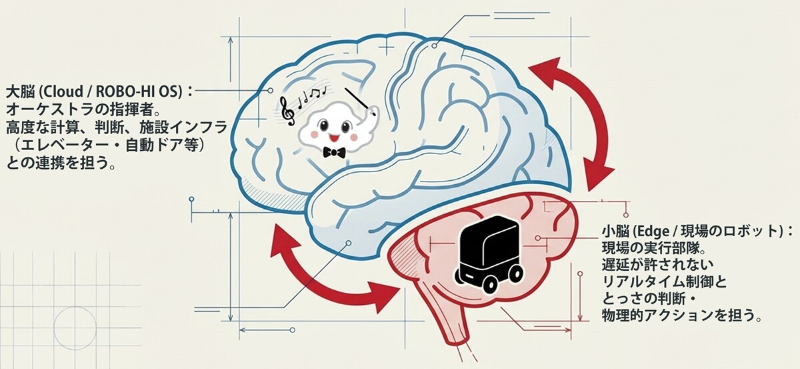
「人とロボットが共生するインフラは、すでに稼働している」
One-Stop
Cloud Service
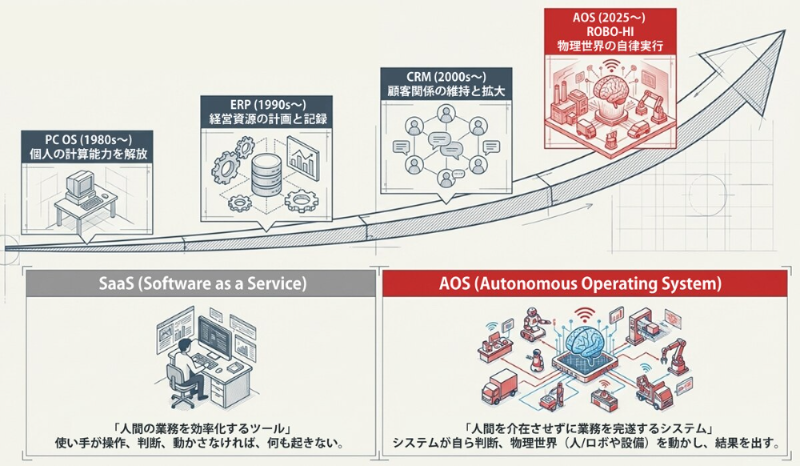
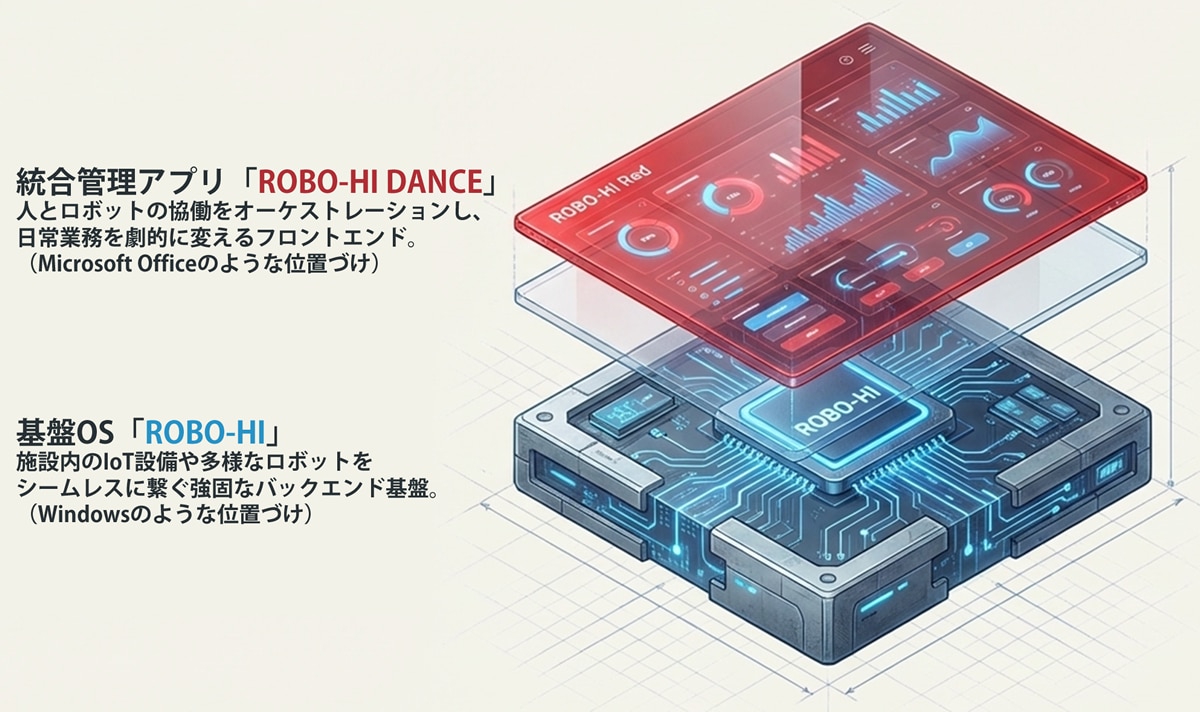
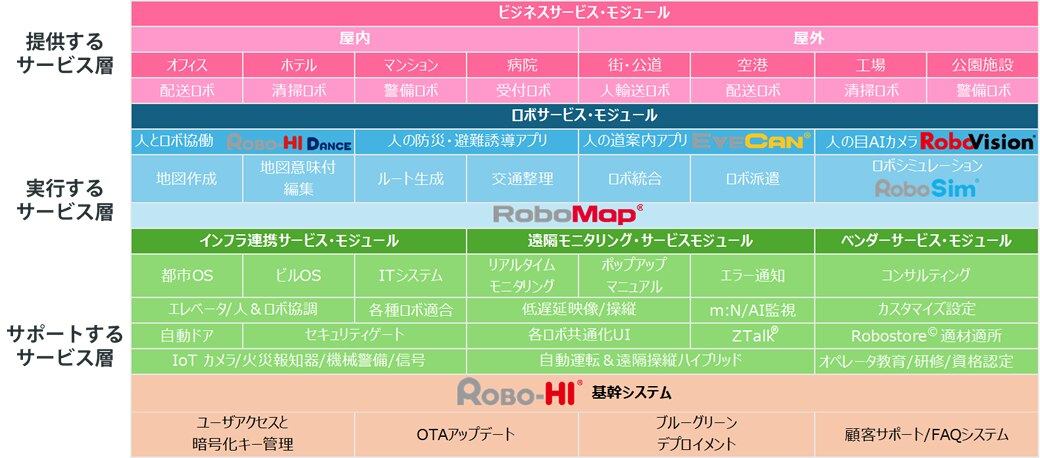
AOS (自律運用OS) ROBO-HI OSは、企業のERP(Enterprise Resource Planning:基幹業務システム)のように建物など施設の資産価値を高め、管理業務の効率化と省人化を図ります。ROBO-HI株式会社(旧ZMP)が長年ロボを実運用する中で磨き上げられたシステム群をパッケージ化した、ワンストップ型のクラウドサービスです。
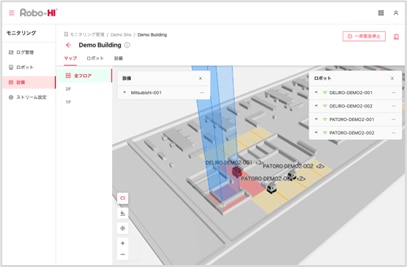
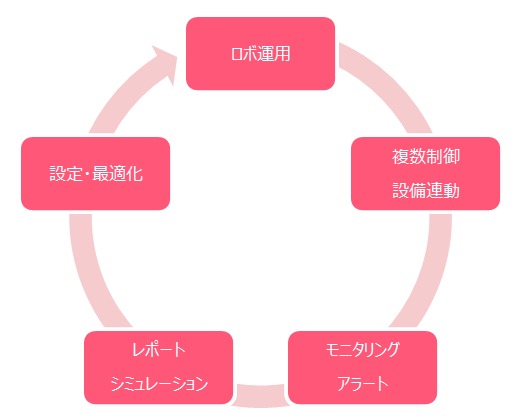
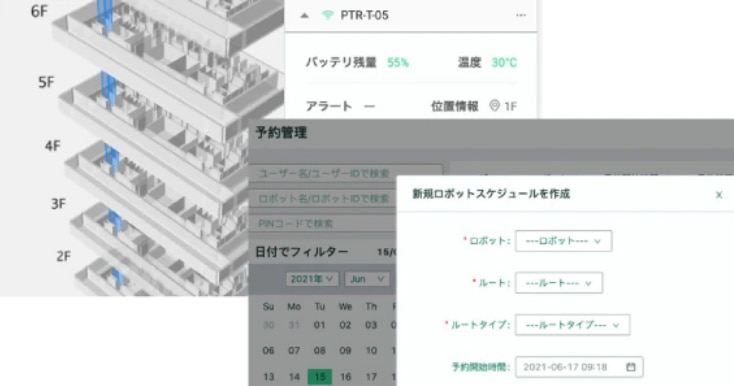
モニタリング・制御
リアルタイムの稼働状況を可視化。複数のロボを最適に交通制御、問題発生時のアラート・通知機能を備えており、安心安全なロボ運用を実現。

データ分析
ロボの稼働データを蓄積、生産性レポートとして提供。期間指定やCSVダウンロードなどの機能を備えており、データに基づく運用最適化をサポート。
Solution
| 01 | FEATURES |
私たちROBO-HI株式会社(旧 株式会社ZMP)は、2001年の創業以来培ってきた広範なロボ技術で、人の移動・配送・警備用のライフモビリティや、空港や工場で働くインダストリアルモビリティ、走行基盤となる高精度三次元マップ、複数台のロボを最適に交通整理する技術などを、全て自社にて開発してきました。
システムの提供だけに留まらず、様々な施設でのロボ運用実績に基づいた導入コンサルもお任せください。
RoboStoreに登録された世界中のロボから、お客様のニーズに応えるロボをレコメンドし、実際の施設内での試運転から業務に合わせた設計、導入後のサポートにいたるまでをワンストップで提供します。貴社のロボ運用を成功へと導きます。

| 02 | FEATURES |
| 03 | FEATURES |
Basic Functions
AOS(自律運用OS)ROBO-HI OSは、企業のERP(Enterprise Resource Planning:基幹業務システム)のように建物など施設の資産価値を高め、管理業務の効率化と省人化を図ります。
Service
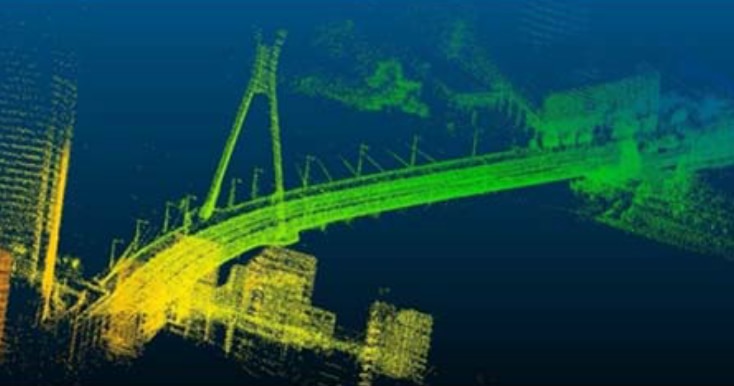
実世界の環境をRoboMapを用いて高精度三次元地図へ変換。BIM(Building Information Modeling)から点群データへ変換可能
様々なロボメーカが使用している様々なデータ形式(三次元・二次元点群、占有グリッドなど)をサポート
様々なロボが持つバラバラな地図座標を、統括管理するROBO-HI OSが絶対座標に合わせる変換ツールを提供

ロボのシナリオを構成するサービス (例: ポイント AからポイントB へ移動する、目の表情を変えたり音声を再生、エレベータに乗って別の階に行くなど)
ロボと外部サービスに意味付情報を提供 (例: 運転可能エリア、信号情報、道路横断情報、エレベータの待機エリア、交通整理の優先エリアなど)

目的地に向かう最適なルートをリアルタイム生成。外部データの影響に対応、リアルタイムにルートを変更し最適化
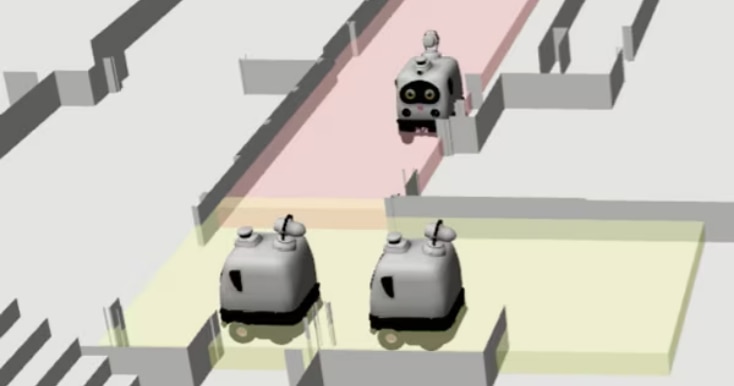
ロボ同士の衝突を防ぎ、狭いエリアでの安全な運航を行うために、複数ロボの交通整理
ロボの優先順位と待機エリアを定義、エリアに入ったときにどのロボが最初に進むかを決定
・優先エリア:狭いエリアで使用 (ロボが 1台しか通過できない)- 優先エリアに最初に行くロボを決定
・エレベータ前待機場所:複数のロボを列に並べてエレベータの乗車を待機

ロボとROBO-HI OS間の通信
ロボからROBO-HI OSへ(位置、ロボタスク、ロボ状態、速度、バッテリー状態など)(ロボとエレベータの状態を報告)
ROBO-HI OSからロボへ(交通規制(発進と停止)タスクやシナリオをロボに送信 タスク:ロボはA地点からB地点へ移動 シナリオ:タスクの集合体、機器(エレベータ、自動ドアなど)の状態を送信
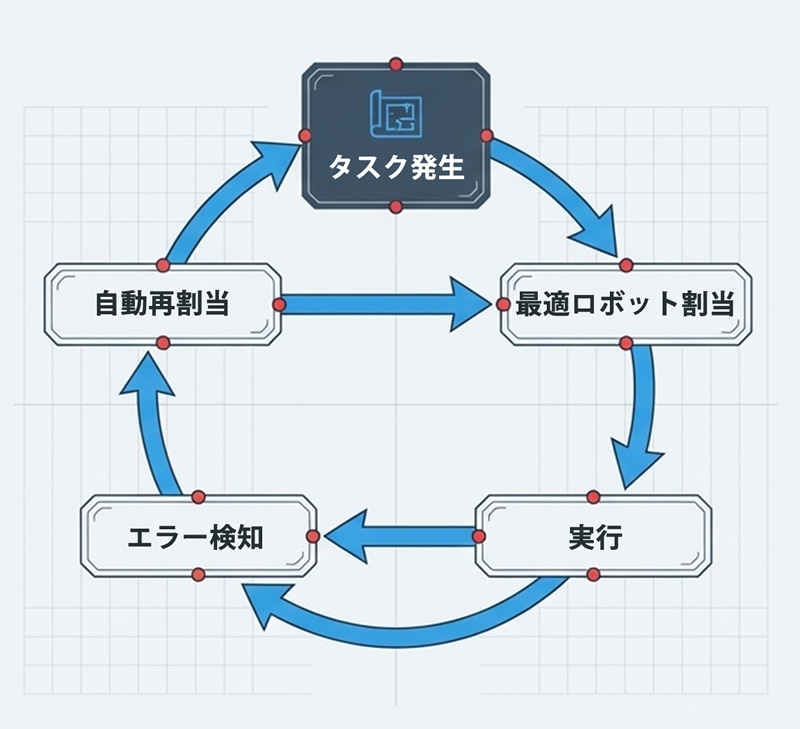
複数ロボのタスクを調整
ロボの選択:サービスタイプ (例: 清掃、配送など) を選択、タスクに最適なロボを自動割当
派遣時間設定:a)オンデマンド:ロボを派遣しすぐにタスクを実行 b) スケジュール:ロボを指定時間にタスク実行を割当
現場処理:例) ロボのエラーやバッテリー切れの場合、タスクに使用可能な次のロボを再割当

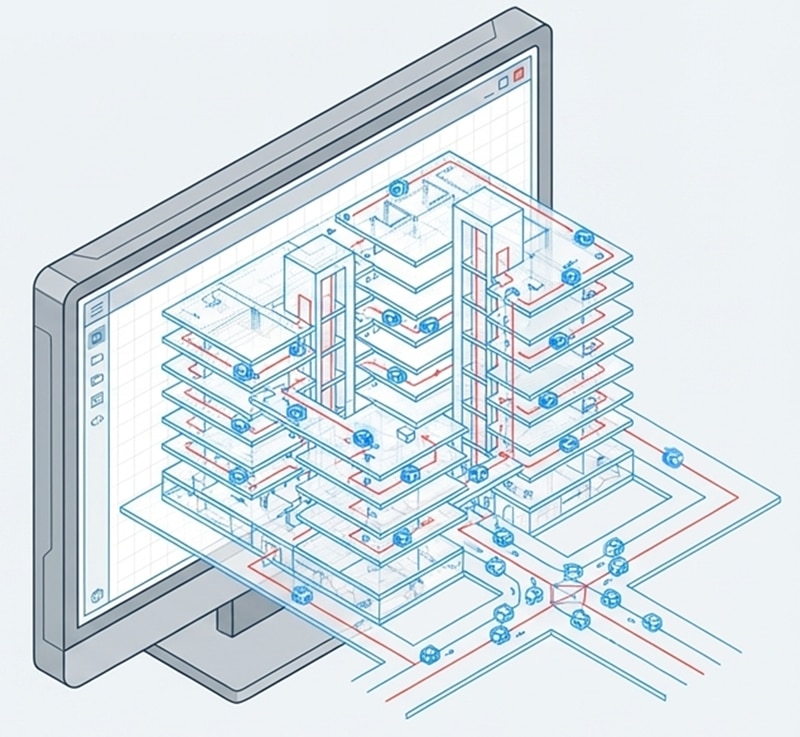
RoboSimを用いたロボの屋内外でのオペレーションを物理シミュレーション。そのデータをIZACに導入するとROBO-HI社製ロボはそのまま稼働
システムのストレステスト(12階建ビルで100台の配送、清掃、案内ロボ・エレベータ自動ドアやセキュリティゲートの稼働シミュレーション)実績
News
Contact
Partner
現在、ベンダーパートナーをはじめ、接続ロボットパートナー、火災報知器・防犯システム・ネットワークカメラ・オフィス環境のIoT機器(温度・湿度・CO2・気圧など)との接続機器パートナー、さらに気象情報や交通情報などの情報サービス提供パートナーを幅広く募集しています。
© ROBO-HI Corporation. All Rights Reserved.