メガメニューを一時的に格納するセクション(消さないでください)
ROBO-HIの技術
次なるパラダイムシフト:現場の完全な自律化
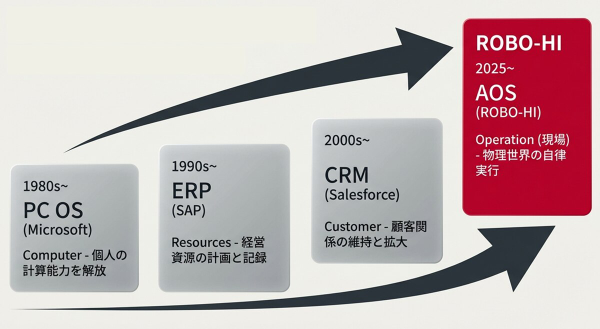
パラダイムシフト:ツールから自律実行へ

「人間の業務を効率化するツール」
使い手が操作、判断、動かなければ、何も起きない。
「人間を介在させずに業務を完遂するシステム」
システムが自ら判断、物理世界(人/ロボや設備)を動かし、結果を出す。
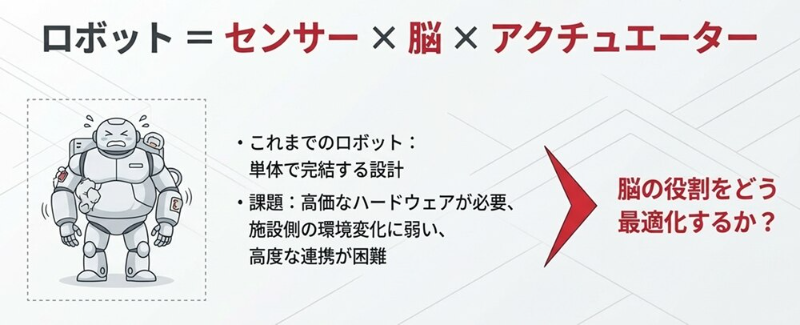
ロボットの再定義と「単体完結」の限界
すべてをロボット本体で処理する従来型モデルの課題
パラダイムシフト:分散型頭脳アーキテクチャ
クラウドの大脳と、エッジの小脳によるハイブリッド制御
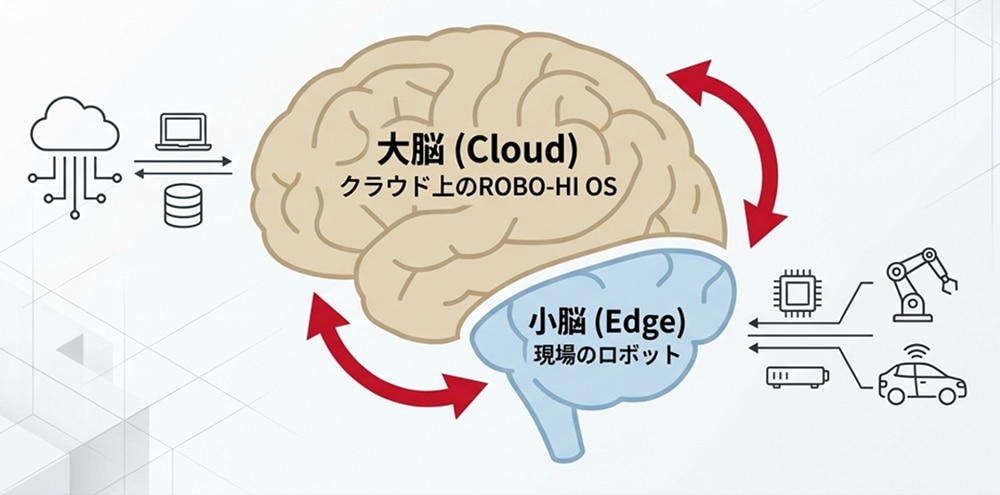
これまでの単体で完結するロボットではなく、クラウドと現場が連携した全体システムを提供します。
大脳:全体を指揮する「ROBO-HI OS」
クラウド上で高度な計算と判断を担うオーケストラの指揮者
役割:オーケストラの指揮者のように振る舞い、ロボットに細かい指示を出す
処理:高度な計算や判断、施設インフラ(エレベーター、自動ドア等)との連携
実装:25年培った自律移動ソフトウェア「IZAC」をクラウド上に実装
小脳:現場で即座に反応する「物理ロボット」
遅延が許されないリアルタイム制御と物理的アクション
役割:とっさの判断や動作の実行
処理:遅延が許されないリアルタイムな制御
構成:現場のセンサー、アクチュエーター、エッジ処理基盤
遠隔で最適制御される現場の実行部隊
分散アーキテクチャが生み出す圧倒的な導入メリット
物理的・セキュリティ的な障壁をクラウドが突破する
安価なハードウェアの活用
自律移動性能が低い安価なロボットでも導入可能に。ROBO-HI OSが弱いところを補完。
物理的障壁のクリア
単体ではエレベーターやフラッパーゲート、セキュリティドアを通過できないロボットも、OSが施設と連携し業務サポートを実現。

セキュリティ懸念の払拭
世界中のロボットを支援・統括するOSとなることで、ユーザーはロボットの生産国を問わず安心して導入可能。(ハードウェアの抽象化と安全管理)
Physical AIを実装した ROBO-HI OS 技術
Physical AIとは(ROBO-HI OSの定義)
ROBO-HI OSは、AIの進化を「情報の管理」から「物理世界の制御」へのパラダイムシフトとして捉えています。従来のツール(人間が操作・判断する)から、システムが自ら判断し、物理世界(人・ロボット・設備)を動かして結果を出す自律実行システムへと移行することが、Physical AIの本質です。
Physical AIを実現するアーキテクチャ:「分散型頭脳」
<レイヤー名称役割>
大脳(クラウド):ROBO-HI OS 高度な判断・計算、施設インフラとの連携、全体指揮
小脳(エッジ):物理ロボットリアルタイム制御、センサー・アクチュエーターによる即時反応
クラウド上の大脳がオーケストラの指揮者として振る舞い、現場のロボット(小脳)が即座に実行するハイブリッド制御が、ROBO-HIのPhysical AIの核心です。25年培った自律移動ソフトウェア「IZAC」をクラウド上に実装しています。
分散アーキテクチャがもたらすPhysical AIの導入メリット
安価なハードウェアの活用:自律移動性能が低い安価なロボットでも、ROBO-HI OSが弱点を補完して高機能化
物理的障壁の突破:単体では通過できないエレベーター・フラッパーゲート・セキュリティドアも、OSが施設と連携して対応
セキュリティの確保:ハードウェアを抽象化・管理することで、ロボットの生産国に依存しない安全な導入を実現
Physical AIの具体的な応用事例
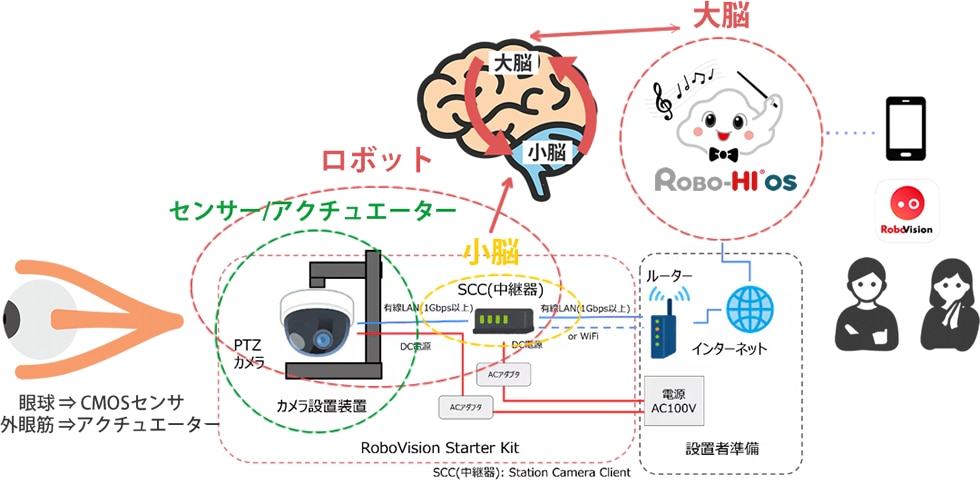
RoboVision(ロボAIカメラ 遠隔操作・視聴アプリ)
大脳:ROBO-HI OS 小脳:PTZカメラ+SCC 眼球:CMOSセンサー
人間の「目」を拡張するビジョンインフラ。Physical AIが遠隔から物理空間を認識・制御。
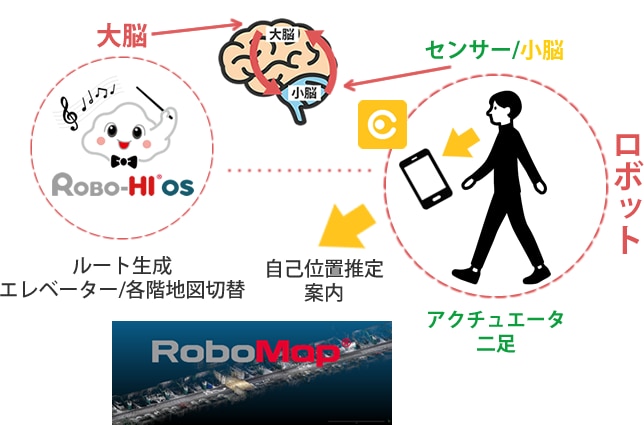
EYECAN(GPS不要 屋内案内アプリ)
大脳:ROBO-HI OS(ルート生成・地図切替) 小脳:人間+スマホ(自己位置推定・案内)
「人間がロボットとして歩く」コンセプト。Physical AIが人体をエッジデバイスとして活用。
HearTomo(心臓の健康状態 可視化アプリ)
Apple Watch × ROBO-HI OS
バイタルセンサーをインフラとして活用。Physical AIが人体の状態を把握し、バイオフィードバックを提供。
まとめ
ROBO-HI OS技術は、Physical AI=クラウドAIと物理ロボットが一体となり、現場を自律制御するシステムです。
単なる自動化ツールではなく、物理世界を直接動かすインテリジェントOSとしてのROBO-HI OSが中心にあり、ロボットだけでなく、人が使用しているカメラ・スマートフォン・ウェアラブルまで多様な物理デバイスをエッジとして統合するエコシステムを構成しています。
ROBO-HI OSとアプリ関連技術

ロボAIカメラの遠隔操作・視聴アプリ RoboVision
ビジョン・インフラの普及を目的とし人間の目の機能の拡張をしています。
Robot × ROBO-HI OS
大脳=ROBO-HI OS
小脳・センサー・アクチュエーター=ロボット(PTZ camera + SCC)
眼球=CMOSセンサー
外眼筋=アクチュエーター

GPS不要屋内案内アプリ EYECAN
三次元地図インフラの普及を目的として、人間がロボットとして歩くコンセプトです。
Robot × ROBO-HI OS
大脳=ROBO-HI OS⇒ルート生成、エレベーター/各階地図切替
小脳・センサー・アクチュエーター=ロボット(人間+スマホ)⇒自己位置推定や案内

心臓の健康状態可視化アプリ HearTomo
バイタルセンサ・インフラの普及を目的としています。
心臓の健康状態や人の心の様子を本人に視覚化し、理解を促します。それにより、人は改善の努力をして改善に向かうというバイオフィードバック効果を生み出し、人と以心伝心のロボ・サービスを提供します。
Apple Watch × ROBO-HI OS
自動運転・ロボットコラム
自動運転・ADASのソフトウェア開発 | データセットの選び方とは?
ロボットと人がともに進化する街
「ロボタウン」を徹底解説
自動運転はいつから始まった?知られざる開発秘話を初公開!
自動運転・ADASを知る

Autonomous Driving
(自動運転)について

ADAS(先進運転支援システム)
について
ステレオカメラについて
自動運転・物流関連 用語集
自動運転・ADAS 用語集




© ROBO-HI Corporation. All Rights Reserved.